Autor: inż. Arkadiusz Urbankiewicz
Promotor: dr inż. Dominik Łuczak
Praca dyplomowa inżynierska. Studia niestacjonarne.
Celem zrealizowanej pracy było zaprojektowanie oraz wykonanie systemu składającego się z mikroprocesorowej stacji pogodowej, architektury chmurowej współpracującej ze stacją oraz witryny internetowej umożliwiającej zarządzanie stacją pogodową. Współpraca stacji z usługami chmurowymi objawia się poprzez obustronną wymianę danych. Dane przekazywane przez stacje do chmury to parametry pogodowe, których pomiaru dokonuje zaprojektowany mikroprocesorowy układ pomiarowy. Dane odbierane przez stację natomiast stanowią komendy sterujące za pomocą których osoba zarządzająca stacją może dokonywać zmian w jej funkcjonowaniu. Zakres wykonanych prac podczas realizacji projektu zawierał zarówno prace związane z częścią sprzętową systemu jak i częścią programistyczną i konfiguracyjną. Od strony sprzętowej wykonany został mikroprocesorowy system pomiarowy oraz współpracujące z nim moduł czujników oraz moduł zasilający. Budowa stacji obejmowała wybór odpowiednich komponentów z zakresu mikrokontrolera, elementów zasilających a także czujników oraz zaprojektowanie płytek PCB. Zaprojektowany i wykonany w ramach pracy układ pomiarowy stacji pogodowej opiera się na mikrokontrolerze ATmega16 (język C) i jest w stanie dokonać pomiaru aktualnej wartości temperatury, ciśnienia atmosferycznego, nasłonecznienia, wilgotności powietrza oraz kierunku i prędkości wiatru. Za komunikację z infrastrukturą chmurową w urządzeniu odpowiada algorytm realizowany za pośrednictwem komputera jednopłytkowego Raspberry Pi (język Python). Urządzenie komunikuje się z usługami w chmurze z wykorzystaniem protokołu komunikacyjnego MQTT. Za pomocą Google Cloud Platform, narzędzia pozwalającego na wdrażanie i konfigurację usług chmury obliczeniowej Google, stworzono architekturę wdrażającą w urządzeniu ideę Internet of Things oraz pozwalającą na przetwarzane danych pochodzących ze stacji. Wynikiem przetwarzania danych jest przechowywany w zasobach chmury plik JSON zawierający informację o pomiarach realizowanych przez stację pogodową. Ostatnim elementem systemu jest strona internetowa, która umożliwia analizę danych oraz zarządzanie urządzeniem poprzez zawarty w niej interfejs użytkownika. Do stworzenia strony, w aspekcie back-endu posłużono się micro-frameworkiem Flask natomiast front-end witryny stanowią pliki HTML, CSS oraz JavaScript.

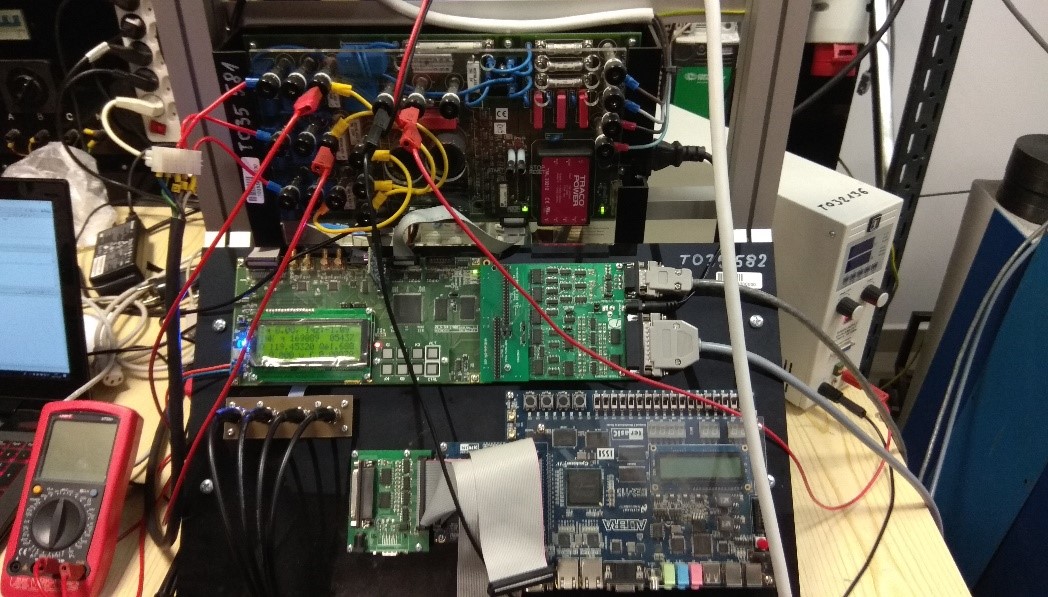
Rys. 1 Przedstawienie budowy urządzenia.

Rys. 2 Wykonana płytka PCB mikroprocesorowego układu pomiarowego

Rys. 3 Ostateczna struktura systemu.

Rys. 4 Widok strony głównej .

Rys. 5 Trendy- wykres liniowy.